Par cinemático: conceito, classificação. Junta de esfera, dobradiça
Qualquer mecanismo complexo em engenharia mecânica consistede uma coleção de elementos simples. Para entender como o sistema funciona como um todo, é necessário desmontar a operação de cada nó. E isso, acima de tudo, é uma compreensão do que é um par cinemático.

Termos básicos
Se você pegar dois itens (links) queem contato um com o outro, e enquanto essa relação é móvel, então temos um par cinemático (KP). Sua característica distintiva é uma certa limitação no movimento de links.
Sólido pode ter uma capacidade limitadamovimento, e então há tal coisa como uma condição de comunicação. Até cinco condições de comunicação são responsáveis pela interação dos links em um par. Daí a divisão em classes. Eles trouxeram cinco para pares cinemáticos, cada um deles tem seu próprio grau de mobilidade. A turma possui seis graus de mobilidade. Toda a mecânica moderna é baseada na aplicação das três últimas classes de pares cinemáticos.
Cada corpo (link) tem sua própria geometria. Portanto, os elementos, que correspondem a esta forma em partes, estão em contato uns com os outros. Acontece que o manual só pode realizar esse movimento, o que não contradiz a geometria dos links. Além disso, para fazer qualquer movimento relativo um ao outro, um link deve ser permanentemente fixo, e o segundo no par é afetado.
Cada ponto no link no momento do movimentopassa o caminho (trajetória). Essa trajetória pode assumir a forma de uma curva localizada em um plano. Quando os planos da localização das curvas da passagem dos elos de um par são paralelos entre si - este é um par plano. Se as curvas de movimento dos pontos dos links estiverem localizadas no espaço tridimensional, o par cinemático será espacial.

Tipos
Existem os seguintes tipos de mecanismos.
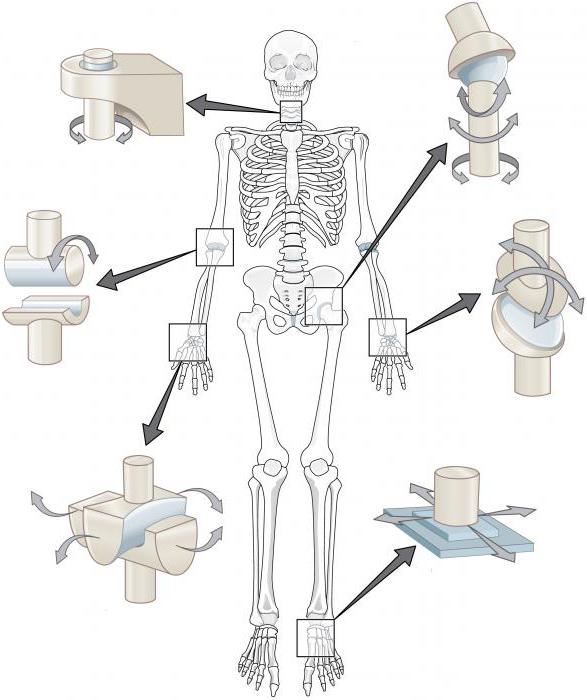
Par tipo rotativo é um sistema único de mobilidade. Os elos que constituem tal par são capazes de realizar apenas uma rotação característica em torno de uma haste ou eixo. Neste caso, o contato dos elementos é realizado na superfície de uma forma cilíndrica. Esse sistema geométrico é fechado e pertence ao menor. O mecanismo analógico no campo dos pares mais altos tem um rolamento de esferas.
Par de interação translacional mesmo que anterior em termos demobilidade única. Nesse sistema, os links só podem executar o movimento de translação em uma direção de linha reta. O mecanismo é o par mais baixo, fechado em parâmetros geométricos.
Par de cilindros interativos tipo. Este sistema já é dvuhpodvizhnaya, sua geometria está fechada. É mais baixo - os links podem girar ou se mover na direção para frente.
Par esférico é um sistema de três motores. A liberdade desse par tem um grau que permite que seus links girem no espaço tridimensional, descrevendo os eixos das coordenadas. É também o menor mecanismo fechado geometricamente.
Um par de tipo esférico com um dedo - dvuhvodvizhny. O movimento (rotação relativamente independente) dos elos deste par é limitado pelo dedo e pela ranhura. Um par de ordem inferior é fechado geometricamente.
Tipo de parafuso tem um grau único de liberdade de mobilidade. O mecanismo de ordem inferior é um sistema geometricamente fechado, no qual apenas um caractere de parafuso pode se mover de acordo com uma determinada etapa. O movimento na direção angular e linear é estritamente um-para-um.
Um par de tipo plano, avião-cilindro, avião-bola. Nestes mecanismos, o fechamento de força é usado. Na classe um, pertence aos mais baixos, o resto aos sistemas superiores. Na prática, esses pares cinemáticos de links não encontraram aplicação.
Classificação
KP tem a seguinte classificação.
- Pelo tipo de comunicação no local de contato.
Casais da ordem inferior são contatados por linkssuperfícies. Eles são amplamente utilizados em mecânica, têm um design mais simples do que pares mais altos. Estruturalmente, seus elos tocam os planos e deslizam ao longo deles. Assim, há uma distribuição uniforme da carga dentro do elemento, mas a fricção no ponto de conexão dos links, respectivamente, aumenta. O momento positivo de pares de ordem inferior é que é possível transferir grandes cargas de um link para um link.
Maiores pares cinemáticos possuem links de contato.em uma curva ou em pontos. Seu objetivo principal é reduzir o grau de atrito entre os elementos dos elos durante o movimento. Um exemplo clássico de pares mais altos é rolamentos ou rolos. O design interno desses elementos não afeta o movimento de links conectados em um par. Para simplificar o mecanismo, métodos de substituição de pares cinemáticos mais altos com análogos mais baixos são usados.
- Pela forma do movimento relativo, que fazem os elos do par.
- Rotacional
- Translacional
- Cilíndrico.
- Esférico.
- Parafuso
- Plano.
Se houver apenas pares no mecanismo que usam apenas os quatro primeiros tipos de movimento, ele é chamado de alavanca.
- Por tipo de comunicação entre os links.
- Devido ao efeito de força, como pressão de mola, massa corporal, gás comprimido ou líquido, forças inerciais.
- Devido aos elementos de design geométrico do par.
- De acordo com o grau de mobilidade dos links quando se deslocam.
- Pelo número de condições de comunicação.
Mecanismos reversíveis e irreversíveis
Sempre que possível, os movimentos de ligações no sistema no que diz respeito à escolha de uma ligação condicionalmente fixa distinguem-se por um KP reversível e irreversível.
Se no mecanismo de qualquer elemento no livreo estado repete o movimento relativo de um elemento em um estado condicionalmente estacionário, então o par cinemático é considerado reversível (por exemplo, pares em movimento único).
Se no mecanismo cada elemento em seu estado livre torna seu movimento relativo diferente dos outros, então esse par é irreversível.

Tipos de engrenagem em mecânica
Sob a transmissão mecânica entende mecânicaum sistema que converte a cinemica e a energia do motor numa forma aceitel para ser utilizada pelos corpos de trabalho das muinas de modo a funcionar num determinado modo.
Transmissões são:
- Tipo de engrenagem. Esta conexão é construída em elementos cilíndricos e cônicos. O primeiro movimento de transmissão no mesmo plano, o segundo - em um ângulo. As engrenagens são caracterizadas pela compactação e pela capacidade de transferir alta potência. Eles são altamente eficientes, mas criam ruído durante a operação e exigem lubrificação.
- Tipo de parafuso. Além do parafuso clássico, esta categoria inclui engrenagens hipóides e sem-fim. O último tipo de transmissão mecânica é usado no caso em que é necessário obter uma relação de transmissão grande. Eles também são notáveis por seu silêncio e suavidade no trabalho e capacidade de auto-retardamento. As desvantagens incluem baixa eficiência e alto desgaste.
- Em elementos flexíveis. Aqui, movimento e energia são transmitidos no mesmo plano devido a diferentes correias e correntes. Os acionamentos por correia são simples e capazes de cobrir longas distâncias.
- Tipo de fricção. Relacionamentos dessa natureza aplicam a força do atrito. Use-os nos mecanismos, cuja operação ocorre em condições difíceis.

Dobradiça tipo bola
O objetivo principal da junta esférica éA haste transversal pode ser conectada através de uma alavanca com uma roda giratória. O design da dobradiça inclui uma ponta; tostas, mola, tampa de pressão, dedo de bola, lubrificador são incorporados a ele. A mola pressiona as bolachas da articulação esférica, que seguram o dedo com superfícies esféricas. Este design garante o funcionamento do mecanismo mesmo quando está desgastado.

Dobradiça
Loops ou dosséis - mecanismos construídos sobrebase da dobradiça cilíndrica. Eles servem para abrir e fechar portas, janelas, portas de móveis. O design da articulação inclui duas lâminas retangulares (mapas) nas quais os furos de montagem e a haste são perfurados. Faça dobradiças de dobradiça principalmente de aço e várias ligas.
Conclusão
Curiosamente, as articulações humanas são todos os principais tipos de pares cinemáticos descritos acima. Portanto, há uma necessidade óbvia de entender os processos que ocorrem na mecânica.